
Jednotlivé riadiace jednotky sú navzájom prepojené a môžu si vymieňať dáta.
Autobus je obojsmerný, t.j. akékoľvek zariadenie, ktoré je k nemu pripojené, môže prijímať a odosielať správy.
Signál snímača (senzor) vstupuje do najbližšej riadiacej jednotky, ktorá ho spracuje a odovzdá na dátovú zbernicu CAN.
Akákoľvek riadiaca jednotka pripojená na dátovú zbernicu CAN dokáže prečítať tento signál, vypočítať na základe neho hodnotu riadiacej akcie a ovládať servopohon.
CAN komunikácia
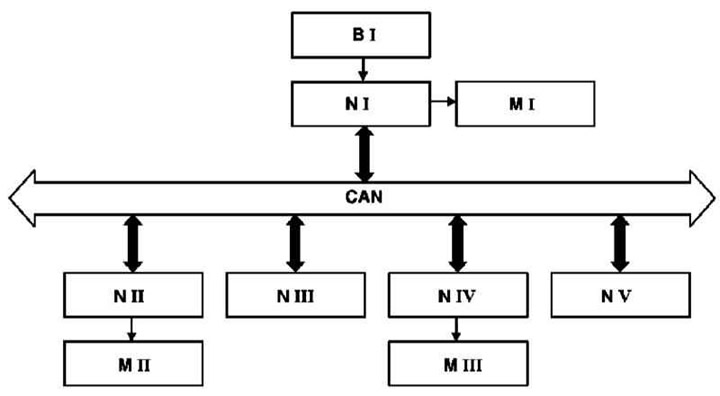
- B - Senzor 1
- CAN - Dátová zbernica
- M - Výkonné prvky I-III (servo mechanizmy)
- N - Riadiace jednotky (ovládače) I-V
Výhody
Pri bežnom káblovom pripojení elektrických a elektronických zariadení je každá riadiaca jednotka priamo prepojená so všetkými snímačmi a akčnými členmi, z ktorých prijíma merania alebo ktoré riadi.
Komplikácia riadiaceho systému vedie k nadmernej dĺžke alebo viacnásobným káblovým vedeniam.
V porovnaní so štandardnou kabelážou poskytuje dátová zbernica:
- Zníženie počtu káblov. Vodiče zo snímačov sa ťahajú len k najbližšej riadiacej jednotke, ktorá namerané hodnoty prevedie na dátový paket a prenesie ho na zbernicu CAN.
- Aktuátor môže ovládať ľubovoľná riadiaca jednotka, ktorá prijíma príslušný dátový paket cez zbernicu CAN a na jeho základe vypočítava hodnotu riadiacej akcie na servomechanizme.
- Vylepšená elektromagnetická kompatibilita.
- Zníženie počtu konektorov a zníženie počtu kontaktných výstupov na riadiacich jednotkách.
- Strata váhy.
- Zníženie počtu snímačov, pretože signály jedného snímača (napríklad zo snímača teploty chladiacej kvapaliny) môžu byť použité rôznymi systémami.
- Zlepšenie diagnostických schopností. Pretože signály jedného snímača (napríklad signál rýchlosti) sú používané rôznymi systémami, potom ak všetky systémy používajúce tento signál vydajú poruchové hlásenie, je zvyčajne chybný snímač alebo riadiaca jednotka, ktorá spracováva jeho signály. Ak chybové hlásenie pochádza len z jedného systému, hoci tento signál využívajú aj iné systémy, príčina poruchy je najčastejšie v riadiacej jednotke alebo servomechanizme.
- Vysoká rýchlosť prenosu dát - možná až 1 Mbps s maximálnou dĺžkou linky 40 m. V súčasnosti sa dátové rýchlosti na vozidlách pohybujú od 83 Kbps do 500 Kbps.
- Na tej istej linke je možné postupne prenášať niekoľko správ.
Dátová zbernica CAN pozostáva z dvojvodičového vodiča vyrobeného vo forme krúteného páru. Všetky zariadenia pripojené k tejto linke (riadiace jednotky zariadenia).
Prenos dát prebieha duplicitne na oboch vodičoch a logické úrovne dátovej zbernice sú zrkadlené (to znamená, že ak sa úroveň logickej nuly prenáša na jeden vodič, potom sa logická úroveň prenáša na druhý vodič a naopak).
Schéma dvojvodičového prenosu sa používa z dvoch dôvodov: na zistenie chýb a ako základ spoľahlivosti.
Ak sa napäťová špička vyskytne len na jednom vodiči (napríklad kvôli problémom s EMC (elektromagnetická kompatibilita)), prijímacie jednotky to môžu identifikovať ako chybu a ignorovať túto napäťovú špičku.
Ak dôjde ku skratu alebo prerušeniu jedného z dvoch vodičov dátovej zbernice CAN, potom vďaka integrovanému hardvérovému a softvérovému systému spoľahlivosti dôjde k prepnutiu do jednovodičového režimu prevádzky. Poškodené prenosové vedenie nebude použité.
Objednávka a formát prenášaný a prijímaný používateľmi (predplatiteľov) správ je definovaný v komunikačnom protokole.
Významným rozlišovacím znakom dátovej zbernice CAN v porovnaní s inými zbernicovými systémami založenými na princípe adresovania účastníkov je adresovanie súvisiace so správou.
To znamená, že každej správe na dátovej zbernici CAN je priradená jej trvalá adresa (identifikátor), označujúce obsah tejto správy (napr.: teplota chladiacej kvapaliny). Protokol dátovej zbernice CAN umožňuje prenos až 2048 rôznych správ, pričom adresy od 3 do 2048 sú trvalo fixné.
Množstvo dát v jednej správe na dátovej zbernici CAN je 8 bajtov.
Blok prijímača spracováva iba tieto správy (dátové pakety), ktoré sú uložené v jeho zozname CAN správ prijatých na dátovej zbernici (akceptačná kontrola).
Dátové pakety je možné prenášať len vtedy, ak je dátová zbernica CAN voľná (t.j. ak po poslednom dátovom pakete nasleduje interval 3 bitov a žiadna riadiaca jednotka nezačne posielať správu).
V tomto prípade musí byť logická úroveň dátovej zbernice recesívna (logické «1»).
Ak viaceré riadiace jednotky začnú vysielať správy súčasne, potom sa uplatní princíp priority, podľa ktorého sa správa na dátovej zbernici CAN s najvyššou prioritou prenesie ako prvá bez straty času alebo bitov (arbitráž žiadostí o prístup k spoločnej dátovej zbernici).
Každá riadiaca jednotka, ktorá stratí právo rozhodovať, sa automaticky prepne na príjem a znova sa pokúsi odoslať svoju správu, len čo sa dátová zbernica CAN opäť uvoľní.
Okrem dátových paketov existuje na dátovej zbernici CAN aj požiadavkový paket pre konkrétnu správu.
V tomto prípade na túto požiadavku odpovie riadiaca jednotka, ktorá môže poskytnúť požadovaný dátový paket.
Formát dátových paketov
V normálnom režime prenosu majú dátové pakety nasledujúce konfigurácie blokov (rámy):
- Data Frame (rámec správy) na prenos správ na dátovej zbernici CAN (napr.: teplota chladiacej kvapaliny).
- Remote Frame (rám žiadosti) vyžiadať si správy na dátovej zbernici CAN od inej riadiacej jednotky.
- Error Frame (chybový rámec) všetky pripojené riadiace jednotky sú upozornené, že sa vyskytla chyba a posledná správa na dátovej zbernici CAN je neplatná.
Protokol dátovej zbernice CAN podporuje dva rôzne formáty správ dátovej zbernice CAN, ktoré sa líšia iba dĺžkou identifikátora:
- štandardný formát;
- rozšírený formát.
V súčasnosti sa používa štandardný formát.
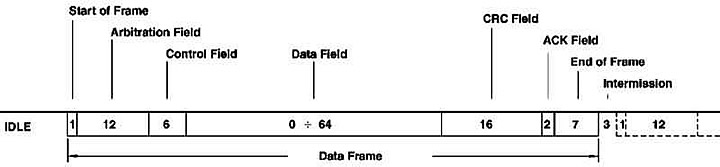
Dátový paket na prenos správ na dátovej zbernici CAN pozostáva zo siedmich po sebe nasledujúcich polí:
- Start of Frame (štart bit): Označí začiatok správy a synchronizuje všetky moduly.
- Arbitration Field (ID a žiadosť): Toto pole pozostáva z identifikátora (adresy) 11 bitov a 1 kontrolný bit (Remote Transmission Request-Bit). Tento riadiaci bit označuje paket ako dátový rámec (rámec správy) alebo ako vzdialený rám (rám žiadosti) žiadne dátové bajty.
- Control Field (ovládacie bity): Kontrolné pole (6 bit) obsahuje bit IDE (Identifier Extension Bit) na rozpoznanie štandardného a rozšíreného formátu, náhradný bit pre následné rozšírenia a - v posledných 4 bitoch - počet dátových bajtov vložených do dátového poľa (dátové pole).
- Data Field (údajov): Dátové pole môže obsahovať 0 až 8 bajtov údajov. Na synchronizáciu distribuovaných procesov slúži správa na dátovej zbernici CAN s dĺžkou 0 bajtov.
- CRC Field (kontrolné pole): CRC pole (Cyclic-Redundancy-Check Field) obsahuje 16 bitov a slúži na kontrolné rozpoznávanie chýb pri prenose.
- ACK Field (potvrdenie o prijatí): pole ACK (Acknowledgement Field) obsahuje potvrdzovací signál pre všetky prijímacie jednotky, ktoré prijali správu cez zbernicu CAN bez chýb.
- End of Frame (koniec rámu): Označuje koniec dátového paketu.
- Intermission (interval): Interval medzi dvoma dátovými paketmi. Interval musí byť aspoň 3 bity. Potom môže ľubovoľná riadiaca jednotka preniesť ďalší dátový paket.
- IDLE (kľudový režim): Ak žiadna riadiaca jednotka neposiela správy, zbernica CAN zostane v nečinnom režime, kým sa neprenesie ďalší dátový paket.
Priority
Aby bolo možné údaje spracovávať v reálnom čase, musí byť možné ich rýchlo prenášať.
To si vyžaduje nielen spojenie s vysokou fyzickou dátovou rýchlosťou, ale tiež rýchle zabezpečenie spoločnej CAN zbernice, ak niekoľko riadiacich jednotiek potrebuje posielať správy súčasne.
Aby bolo možné rozlíšiť medzi správami prenášanými na dátovej zbernici CAN podľa stupňa naliehavosti, sú pre jednotlivé správy poskytnuté rôzne priority.
Napríklad časovanie zapaľovania má najvyššiu prioritu, hodnoty sklzu majú stredné a vonkajšia teplota má najnižšiu prioritu.
Priorita, s ktorou sa správa prenáša na zbernici CAN, je určená identifikátorom (adresu) príslušnú správu.
Identifikátor zodpovedajúci menšiemu binárnemu číslu má vyššiu prioritu a naopak.
Protokol dátovej zbernice CAN je založený na dvoch logických stavoch: Bity sú buď «recesívny» (logické «1»), alebo «dominantný» (logické «0»). Ak je dominantný bit vysielaný aspoň jedným modulom, potom sú recesívne bity prenášané inými modulmi prepísané.
Príklad
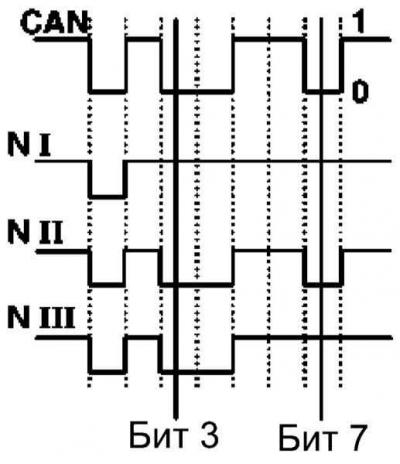
Ak niekoľko riadiacich jednotiek spustí prenos dát súčasne, konflikt prístupu k spoločnej dátovej zbernici je vyriešený o «bitové rozhodovanie žiadostí o zdieľané zdroje» s príslušnými identifikátormi.
Pri vysielaní poľa identifikátorov vysielač po každom bite kontroluje, či má ešte vysielacie právo, alebo či už iná riadiaca jednotka na dátovej zbernici CAN vysiela správu s vyššou prioritou.
Ak je recesívny bit vysielaný prvou vysielacou jednotkou prepísaný dominantným bitom inej vysielacej jednotky, potom prvá vysielacia jednotka stráca právo vysielať (arbitráž) a stáva sa prijímacou jednotkou.
Prvá riadiaca jednotka (N I) stráca arbitráž od 3. bitu.
Tretia riadiaca jednotka (N III) stráca arbitráž od 7. bitu.
Druhá riadiaca jednotka (N II) si ponecháva právo prístupu k dátovej zbernici CAN a môže prenášať jej správu.
Ostatné riadiace jednotky sa pokúsia preniesť svoje správy na dátovú zbernicu CAN, až keď bude opäť voľná. V tomto prípade bude právo na prenos opäť udelené v súlade s prioritou správy na dátovej zbernici CAN.
Rozpoznanie chyby
Rušenie môže viesť k chybám pri prenose údajov. Takéto chyby prenosu by sa mali rozpoznať a opraviť. Protokol dátovej zbernice CAN rozlišuje dve úrovne rozpoznávania chýb:
- mechanizmov na úrovni dátového rámca (rámec správy);
- mechanizmy na bitovej úrovni.
Mechanizmy na úrovni dátového rámca
Cyclic-Redundancy-Check:
Vysielač na základe správy prenášanej cez dátovú zbernicu CAN vypočíta riadiace bity, ktoré sú prenášané spolu s dátovým paketom v teréne «CRC Field» (kontrolné súčty). Prijímacia jednotka prepočítava tieto riadiace bity na základe správy prijatej cez dátovú zbernicu CAN a porovnáva ich s riadiacimi bitmi prijatými s touto správou.
Frame Check:
Tento mechanizmus kontroluje štruktúru prenášaného bloku (rám), to znamená, že bitové polia s daným pevným formátom a dĺžkou rámca sa znova skontrolujú.
Chyby zistené Frame Check sú označené ako chyby formátu.
Mechanizmy na úrovni bitov
Monitorovanie:
Každý modul pri vysielaní správy sleduje logickú úroveň dátovej zbernice CAN a zisťuje rozdiely medzi prenášanými a prijímanými bitmi. To zaisťuje spoľahlivé rozpoznanie globálnych a lokálnych bitových chýb, ktoré sa vyskytujú vo vysielacej jednotke.
Bit Stuffing:
V každom dátovom pakete medzi poľom «Start of Frame» a koniec poľa «CRC Field» nemalo by existovať viac ako 5 po sebe idúcich bitov s rovnakou polaritou.
Po každej sekvencii 5 identických bitov pridá blokový vysielač k bitovému toku jeden bit s opačnou polaritou.
Prijímacie jednotky vymažú tieto bity po prijatí správy na dátovej zbernici CAN.
Riešenie problémov
Ak niektorý modul dátovej zbernice CAN zistí chybu, preruší aktuálny proces prenosu dát odoslaním chybového hlásenia. Chybové hlásenie pozostáva zo 6 dominantných bitov.
Vďaka chybovému hláseniu sú všetky riadiace jednotky pripojené na dátovú zbernicu CAN upozornené na lokálnu chybu, ktorá sa vyskytla, a podľa toho ignorujú predtým vyslanú správu.
Po krátkej odmlke budú môcť všetky riadiace jednotky opäť posielať správy na dátovej zbernici CAN, pričom ako prvá bude opäť odoslaná správa s najvyššou prioritou.
Riadiaca jednotka, ktorej správa na dátovej zbernici CAN spôsobila chybu, tiež začne znova vysielať svoju správu (funkcia automatickej požiadavky na opakovanie).
Typy zbernice CAN
Pre rôzne oblasti riadenia sa používajú rôzne zbernice CAN. Líšia sa od seba rýchlosťou prenosu dát.
Oblasť prenosovej rýchlosti CAN «motor a podvozok» (CAN-C) je 125 Kbps a dátová zbernica CAN «Salón» (CAN-B) z dôvodu menšieho počtu obzvlášť urgentných správ je navrhnutý pre rýchlosť prenosu dát iba 83 Kbps.
Výmena dát medzi oboma zbernicovými systémami prebieha cez tzv «brány», t.j. riadiace jednotky pripojené na obe dátové zbernice.
Optické vlákno D2B (Digital Daten-Bus) údaje aplikované na oblasť «Zvuk/Komunikácia/Navigácia». Kábel s optickým vláknom dokáže preniesť podstatne väčšie množstvo informácií ako zbernica s medeným káblom.
Komentáre návštevníkov